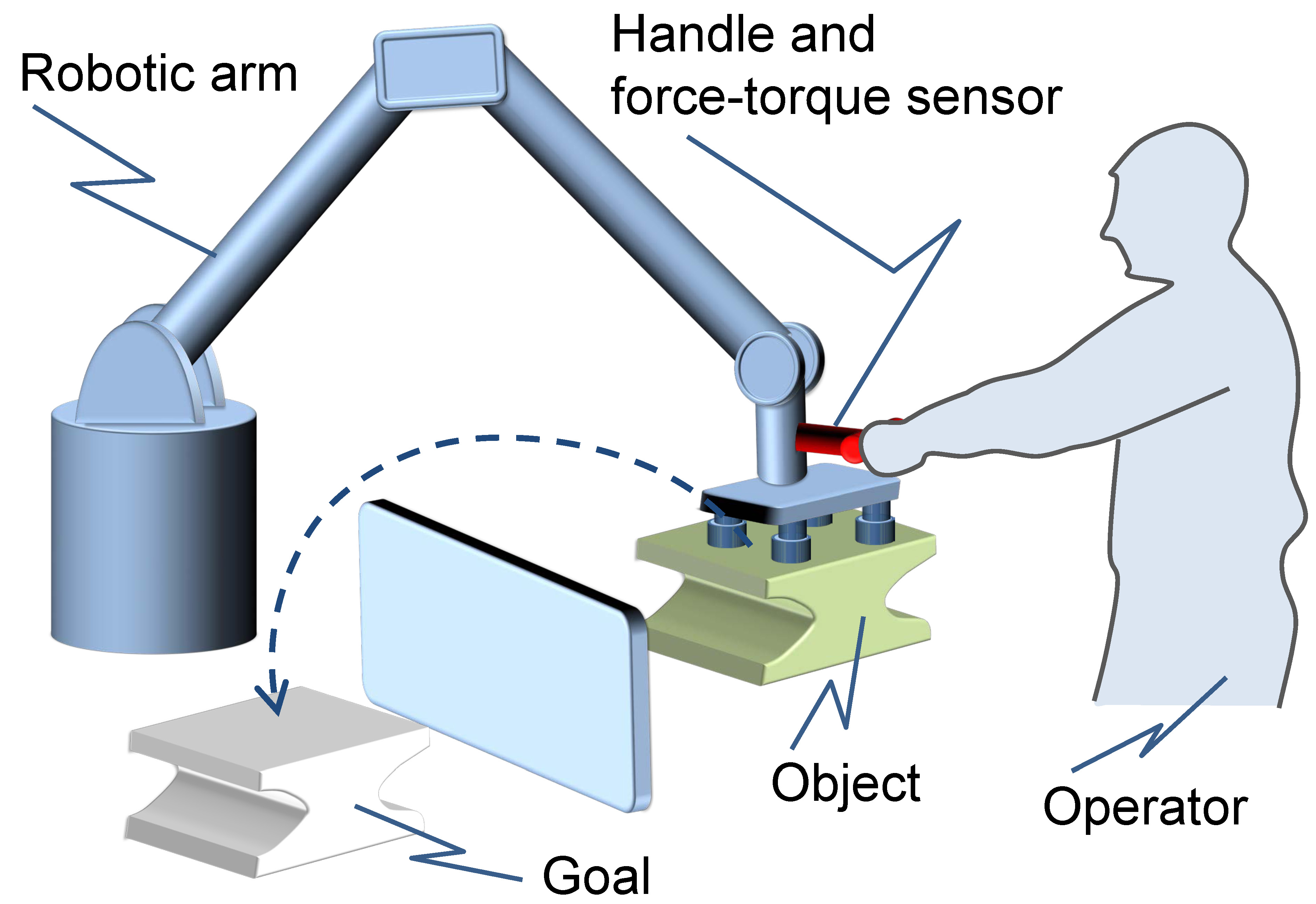
人間・ロボット協調作業のための可変インピーダンス制御
人間とロボットのそれぞれの能力を補完する形態として,人間とロボットによる協調作業が注目されている. 人間・ロボット協調系では,協調作業中の操作性能を向上させるために,操作者によってアーム手先に加えられる操作力に基づいて,
手先に設定された仮想的なインピーダンスを変化させる制御手法が提案されてきた. 一般に,腕姿勢や筋活動により変化する腕の力学パラメータを正確に推定することは困難であるため,人間の腕の正確なモデルを必要とする上述の従来手法では,
操作者に十分な操作環境を提供できなかった.
正確なモデルを用いずに試行を繰り返し実行して制御パラメータを更新することで,制御性能を改善させる手法に繰り返し学習制御がある. ただし,人間・ロボット協調系には操作者が生成する動作にゆらぎがあるため,従来手法を用いた場合ゆらぎによる確率的な不確かさによって学習性能が著しく低下するという問題が生じる.
本研究では,確率的不確かさに対してロバストな更新則を用いた人間・ロボット協調系における可変インピーダンス制御のための繰り返し制御則を提案し,
その有効性を実験により示している.
関連文献
- T. Yamawaki, H. Ishikawa and M. Yashima, ``Itrative Learning of Variable Impedance Control for Human-Robot Cooperation,''Proc. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, pp.839-844,
2016
|
 |
| |
|
 |
|
| |
|
インハンド・マニピュレーションのための操り戦略と学習制御
ロボットハンドが今後より複雑なタスクや環境に対応するには,単純な物体把持のみならず,物体を離さずにハンドの中で物体を滑らせながらその姿勢を変化させるような
器用な操り(インハンド・マニピュレーション)の実現が求められている.
インハンド・マニピュレーションでは,物体とハンドとの運動変化に応じて,接触点数や接触位置が頻繁に変化するため,接触状態遷移に関する大域的な操り計画が必要である.
しかし、運動計画の探索空間は高次元となるため,従来の運動計画手法では解を発見することが困難であった. この問題を解決するために,ランダム探索手法を用いた操り計画アルゴリズムを提案している.
また操り制御に関しては,二つの制御モード(速度制御、トルク制御)を各指で切替える戦略を採用し,モデル化誤差や制御誤差に起因する過剰な内力やジャミングの発生を防いでいる.
さらに,3つの操りモード(準静的操り,動的操り,ケージング)を適切に切替える戦略を採用し,操り状態に応じて最適な操りモードを決定している. これらの操り戦略の有効性は実験により明らかにしている.
一方,上述のモデルベース制御では,ノミナルモデルで考慮されない不確かさの影響を受けるため,実際に計画とおりの操りを実現するには,試行錯誤によるパラメータ調整が必要であった. この問題を解決する手法のひとつに正確なモデルを必要としない繰り返し学習がある. しかし,インハンド・マニピュレーションでは,計測ノイズ,接触状態等の確率的に変動する不確かさや外乱のため,従来の繰り返し学習制御手法では学習性能が低下するといった問題が生じる. さらに,学習の安定性や収束性を調整するための学習ゲインを試行錯誤で決定する必要がある. これらの問題を解決するために,確率的な不確かさに対してロバストな更新則と学習ゲインの調整則を適用したインハンド・マニピュレーションのための 繰り返し学習制御則を提案し,その有効性を実験により明らかにしている.
動画
 インハンド・マニピュレーションの繰り返し学習の様子(3.5MB) インハンド・マニピュレーションの繰り返し学習の様子(3.5MB)
関連文献
- M. Yashima and T. Yamawaki, ``Iterative Learning Scheme for Dexterous In-Hand Manipulation with Stochastic Uncertainty,''Proc. 2018 IEEE International Conference on Robotics and Automation, Brisbane, Australia, pp.3166-3171,
2018
- T. Yamawaki and M. Yashima, ``Application of Adam to Iterative Learning for an In-Hand Manipulation Task,''Proc. the 22nd CISM IFToMM Symposium on Theory and Practice of Robots and Manipulators, Rennes, France, pp.272-279,
2018
- M. Yashima and T. Yamawaki, ``Iterative Learning Control for Whole-Arm Object Manipulation through Coordination of Torque/Velocity-Controlled Fingers,''Proc. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, pp.6223-6230,
2015
- 山脇 輔, 八島 真人, ``全腕マニピュレーションのためのランダム操り計画,''日本ロボット学会誌, Vol.32, No.3, pp.286-294,
2014
- M. Yashima and T. Yamawaki, ``Control Strategy for Whole-Arm Manipulation of a Polygonal Object by Considering the Estimated Bounds of Frictional Coefficient,''Proc. 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, pp.6792-6799,
2014
- T. Yamawaki and M. Yashima, ``Randomized Planning and Control Strategy for Whole-Arm Manipulation of a Slippery Polygonal Object,''Proc. 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, pp.2485-2492,
2013
|
 |
| |
|
 |
|
| |
|
投擲マニピュレーションによる組立て・格納タスクの実現
1自由度ロボットアームの回転運動によって,アーム上の対象物を投擲し,その位置・姿勢及び速度を制御する「投擲マニピュレーション」の実現を目的とする.投擲マニピュレーションは,ロボットの可動範囲外への操りのみならず,制御される対象物の自由度より少ない自由度のロボットによる対象物の操りが可能である.しかし,投擲マニピュレーションでは,ダイナミックかつ高速に対象物を操るため,わずかな未知外乱によって,動的拘束が破綻するといった問題がある.本研究では,これらの問題を解決する学習制御手法とアームの運動計画手法を提案する.また提案手法を用いた投擲マニピュレーションによって,格納・仕分けタスクや簡単な組立てタスクを実現できることを明らかにする.
動画
組立てタスク (4.6MB)
格納・仕分けタスク (4.7MB)
多角形対象物に対する学習の様子 (3.3MB)
質点対象物に対する学習の様子 (4.5MB)
関連文献
- H. Miyashita, T. Yamawaki and M. Yashima, ``Parts Assembly and Sorting
by Throwing Manipulation: Planning and Control,'' Journal of System Design and Dynamics, Vol. 5, No. 1, pp. 139-154, 2011. PDF (1.2MB)
- H. Miyashita, T. Yamawaki and M. Yashima, ``Learning Control Method for
Throwing an Object More Accurately with One Degree of Freedom Robot,''
Proc. 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, pp. 397-402, July, 2010. PDF (320KB)
- 八島 真人, 宮下 英之, 山脇 輔, ``1自由度ロボットによる投擲マニピュレーション,’’ 日本機械学会論文集, Vol. 75, No.
759, C編, pp.3005-3010, 2009.
|
組立てタスク
格納・仕分けタスク |
| |
|
| |
| |
|
ダイナミクスを利用したロバストなマニピュレーション戦略
ロボットのコンフィギュレーションを変えて,系のダイナミクスを適切に調整することで,制御精度の要求される方向の運動が,未知外乱に対して低感度となるようなマニピュレーション計画手法を提案する.この新たな概念を「ダイナミクス整形」とよぶ.本手法は,複雑なフィードバック補償をせずに系のロバスト性を高めることができるという利点があり,実ロボットのマニピュレーション計画への応用が期待できる.
(1) ロボットアームの軌道計画
アーム姿勢を変えてダイナミクス整形を行うことによって,手先位置精度の要求される方向の運動が,未知外乱に対して低感度となるような軌道を計画する.右上図に示す打撃タスクは,外乱による手先位置誤差の発生方向がタスクの達成可否に影響するタスクである.例えば,
(a)に示すように,外乱によって手先が任意の方向に変動してしまうと,手先は目標経路から大きく外れ打撃は失敗する.(b)に示すように,ダイナミクス整形によって,
外乱による手先位置の変動が手先経路の垂直方向に対して低感度となるように軌道を計画することができれば,手先位置の変動を目標経路の近傍に留めることができ,たとえ手先位置の変動があっても目標打撃方向への打撃が可能となる.右下図は,本手法を適用して得られた関節トルク軌道に対してノイズを印加し,3DOFアームを用いてオープンループ制御を行ったときの打撃動作の様子を示す. 本研究では,打撃動作および倣い動作に本手法を適用し,その有効性を明らかにする.
動画
ダイナミクス整形に基づく打撃動作(4.6MB)
関連文献
- T. Yamawaki and M. Yashima, ``Planning Tracking Motion Insusceptible to
Unknown Disturbances Using Sensitivity Measure,'' Proc. 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, December, 2010. PDF (688KB)
- 八島 真人, 山脇 輔, ``ダイナミクス整形によるロバスト打撃動作,’’計測自動制御学会論文集, Vol. 46, No. 6, pp. 346-352,
2010.
- T. Yamawaki and M. Yashima, ``Arm Trajectory Planning by Controlling the
Direction of End-point Position Error Caused by Disturbance, ’’ Proc. 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, X'ian, pp. 1120-1125, July, 2008. PDF (576KB)
- 山脇 輔,八島 真人,``運動指令ノイズを考慮した手先誤差方向制御によるアーム軌道生成,’’第13回ロボティクス・シンポジア予稿集,pp.523-528,2008.
- 八島 真人, 山脇 輔, ``ロボットアームの動的な操作性能に及ぼす重力の影響,’’計測自動制御学会論文集, Vol.44, No.4, pp.361-367,
2008.
|
 |
| |
|
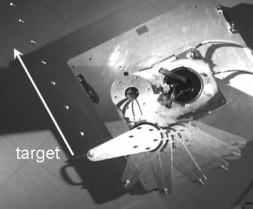
(2) ロボットハンドの把持計画
右上図に示すようなロボットハンドによる局所動作においても同様に,作業タスクに応じて,精度の要求される方向の対象物着目点(タスク座標位置)の運動が,未知外乱に対してロバストとなるように対象物を把持することが望まれる.本研究では,ダイナミクス整形の概念をもとに,高い操りタスク精度性能を有する把持コンフィギュレーションを決定する問題を考える.右下図は,矢印の示す方向に把持対象物を挿入する場合に最適な把持コンフィギュレーションをダイナミクス整形に基づいて得たシミュレーション結果である.本タスクでは,矢印が示す挿入方向と直交する方向に精度が要求される.このようにあらかじめ精度の要求されるタスク座標の方向が分かっている操り作業において本手法は有効である.
関連文献
- 山脇 輔, 八島 真人, ``操りタスク精度性能に基づく把持コンフィギュレーション計画,'' 日本機械学会論文集, Vol. 77, No.
775, C編, pp. 1041-1050, 2011.
- M. Yashima and T. Yamawaki, ``Task-Oriented Accuracy Measure for Dexterous Manipulation,'' Proc. 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, pp. 903-908, February, 2009. PDF (435KB)
- T. Yamawaki and M. Yashima, `` Task Accuracy Measure based on Dynamic Process
for Cooperating Manipulation System, ’’ Proc. 2008 IEEE International Conference on Mechatronics and Automation, Kagawa, FA2-2, August, 2008. PDF (220KB)
|

 |
| |
|
| |
|
| |
|
ランダム手法に基づくロボットハンドの操り計画
ロボットハンドの操り計画問題は,(i) 大きな探索空間,(ii) 複雑な拘束条件(接触モードに応じた運動学的・力学的拘束),(iii) 連続時間系と離散時間系が混在するハイブリッドシステム,といった特徴をもち,解を発見することが困難な問題である.ここでは,ロボットハンドによる器用な操りの実現を目指して,ランダム探索手法(RRT)に基づいた操り計画手法を提案する.そして,接触モードのスイッチングを伴う3次元ロボットハンドの操り計画問題に提案手法を適用し,その有効性をシミュレーションにより明らかにしている.
動画
シミュレーション(楕円体の操り) (1.6MB)
関連文献
- 八島 真人,本田孝広,``ランダム手法に基づく操り計画法の性能評価と設計指針,'' 日本機械学会論文集, Vol. 71, No. 707,
C編, pp.2260-2266, 2005.
- 八島 真人, ``接触モードのスイッチングによる多指ハンドマニピュレーションのランダム計画,’’日本ロボット学会誌, Vol.22, No.6,
pp.788-797, 2004.
- 八島 真人, ``ランダム手法に基づく対象物姿勢のマニピュレーション計画,''計測自動制御学会論文集, Vol.40, No.5, pp.590-598, 2004
- M. Yashima, ``Randomized Manipulation Planning Considering the Local Optimization
of Contact Mode Sequence,’’ Proc. 2003 IEEE/RSJ International Conference on Intelligent and Robots
and Systems, Las Vegas, October, 2003. PDF (664KB)
- M. Yashima, Y. Shiina and H. Yamaguchi, ``Randomized Manipulation Planning for A Multi-Fingered Hand by Switching Contact Modes,’’ Proc. 2003 IEEE International Conference on Robotics and Automation, Taiwan, September, 2003. PDF (277KB)
- 八島 真人, 山口 秀谷, ``接触モードのスイッチングに基づく多指ハンドによる包み込み把握の運動計画 --- ハイブリッドシステムの運動計画
---,'' 計測自動制御学会論文集, Vol.39, No.2, pp.150-158, 2003.
|
 |
| |
|
| |
| |
|
接触モード遷移を伴う全腕マニピュレーションのダイナミクス
全腕マニピュレーションは,対象物を複数のリンクで囲むように接触し,リンク内側で対象物を滑りや転がりをさせて操ることを特徴とする.このような複数の接触点をもつ操りは,ロボットと対象物が剛体であると仮定した場合,その順動力学問題の解が不定となる場合があることが知られている.この問題を解決するために,剛体モデルに基づく線形相補性問題に帰着した手法とコンプライアンスモデルに基づく手法を統合した順動力学アルゴリズムを提案し,その有効性をシミュレーションにより明らかにしている.また,全腕マニピュレーションに対する実験的アプローチとして,摩擦無し接触を仮定した場合の操り制御手法を提案し,その妥当性を実験により検証している.
関連文献
- 八島 真人, 山口 秀谷, ``接触モード遷移を伴うマニピュレーションのダイナミクス,''日本ロボット学会誌, Vol.22, No.4, pp.499-507,
2004
- P. Song, M. Yashima and V. Kumar, ``Dynamics and Control of Whole Arm Grasps,’’
Proc. 2001 IEEE International Conference on Robotics and Automation, Seoul, May, 2001. PDF (837KB)
- P. Song, M. Yashima and V. Kumar, ``Dynamic Simulation for Grasping and Whole Arm Manipulation,’’ Proc. 2000 IEEE International Conference on Robotics and Automation, San Francisco, April, 2000. (Best Manipulation Paper Award Finalist) PDF (1.77MB)
- 八島 真人, 山口 秀谷, 平野 祐治, ``線形相補性問題に基づく多剛体操り系の接触状態遷移に関する動力学解法,'' 計測自動制御学会論文集, Vol.36, No.3, pp.283-289, 2000.
- 八島 真人, 山口 秀谷, 久保 浩, ``多指ハンドのリンク内接触による操り (第1報, 力学的特性),'' 日本機械学会論文集, Vol. 64, No. 622, C編, pp.2067-2073, 1998.
- 八島 真人, 山口 秀谷, 久保 浩, ``多指ハンドのリンク内接触による操り (第2報, インピーダンス制御にもとづく操りの制御),'' 日本機械学会論文集,
Vol. 64, No. 622, C編, pp.2074-2080, 1998.
|
 |
| |
|
| |
|
| |
|
高速多指ロボットハンドによるキャッチング
人間の手が有する拇指対向性の機能が手による巧みな物体操作の実現に寄与していることが知られている.本研究では拇指対向性を有し,広範囲にわたって対象物に対して操作性が高くなるロボットハンドの開発を行う.また開発したロボットハンドを用いて,飛んで来る対象物をキャッチングするための制御アルゴリズムを提案し,高速なキャッチング動作を実現する.
動画
キャッチングの様子 (1.3MB)
開閉運動の様子 (1.3MB)
関連文献
- T. Yamawaki, S. Aasano, H. Miyashita and M. Yashima, `` Robot Catching
with High Manipulability Grasp Configuration using Vision,''Proc. 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, pp. 909-914, February, 2009. PDF(823KB)
- 宮下英之,浅野史郎,山脇輔,八島真人,``拇指対向性を有する高速多指ロボットハンドの機構設計,’’第8回計測自動制御学会システムインテグレーション部門講演会予稿集,pp.671-672,2007.
|

 |
| |
|
| |
| |
|
高速ビジョンを用いたロボットシステムの構築
1000fpsの性能を持つ高速ビジョンを用いた高速トラッキングシステムを構築する.
動画
全方向トラッキングシステム(6.1MB)
7Hzで発光させたLEDを追従している様子 (7.6MB)
上記動画の1/10倍速 (5.1MB)
|
 |
| |
|
 このページのトップへ このページのトップへ |
 |
|
|
|
| Copyright(C) 2011 Control Engineering Laboratory, National Defense Academy of Japan. All Rights Reserved. |
