HILS for developing articulated robots
In the current robot development flow, it is difficult to accurately predict the behavior of a real robot only by numerical simulation. Therefore, it is necessary to repeat the process, such as making a prototype, test it, and improving it. This process extends the development term and increases the cost of the development. In this study, we focus on the robot joint, which is one of the difficult elements to model in the numerical simulation, and propose a simulation method which does not require modeling of the joint. By this, it becomes possible to accelerate the design of the joint mechanism of the next generation robot such as the flexible joint in which the modeling is difficult.
Framework of HILS (Hardware-In-the-Loop-Simulator)
A hardware-in-the-loop simulator (HILS), which combines hardware and software, was applied to robot joints. The numerical model obtained from the CAD (Computer Aided Design) model is used for inertia terms of links. On the other hand, the input torque of the joints is observed by the test of the actual robot joint since it is difficult to model the joints.
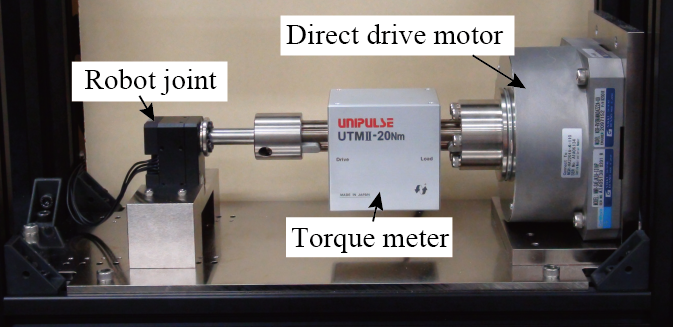
Fig. 1 shows the framework of HILS for robot joints. As shown in Fig. 2, the robot joint is connected to a direct drive (DD) motor via a torque meter, and the DD motor applies to the robot joint a load that would be generated when the articulated robot is actually operated. The generated torque of the robot joint under the condition is measured by the torque meter, the forward dynamics computation outputs the joint angular accelerations based on the numerical model of the links. In the next step, the load is applied to the robot joint by the DD motor based on the computed acceleration. As a result, it is possible to obtain the behavior from the real robot joint every moment during the simulation and to predict the motion of the robot.

Simulation of two DoF planar robot
Fig. 3 shows the HILS of a two DoF planar robot performed with two test benches as an example. The position control gain of the real robot joint was intentionally set low so that the error with the target joint trajectory would occur. The HILS successfully simulated this situation.
References
- Yusuke Noda, Tetsuya Kimura, Satoko Abiko, Teppei Tsujita, Daisuke Sato and Dragomir N. Nenchev, Development of a Hardware-in-the-Loop Simulator for Analyzing Motion of Multi-DoF RobotsWithout Modeling Complex Joint Parts,Proceedings of the SICE International Symposium on Control Systems 2019, 1H1-5, Kumamoto, Japan, 7 March, 2019.