多関節ロボット開発用HILSの提案
現在のロボット開発フローにおいて,数値シミュレーションのみで実際のロボットの挙動を正確に予測することは難しく,実機を試作して試験し改良するといった工程を繰り返す必要があり,開発の長期化・高コスト化の要因となっている.本研究では,数値シミュレーションにおいてモデリングが困難な要素の一つである,ロボット関節に焦点を当て,関節部のモデル化を必要としないシミュレーション方法を提案する.これにより,モデリングが困難な柔軟関節などの次世代ロボットの関節機構の設計を加速することが可能となる.
HILS (Hardware-In-the-Loop-Simulator)の構成
Hardware-in-the-Loop Simulator(HILS)と呼ばれるハードウェアとソフトウェアを組み合わせた解析手法ををロボットの関節に適用する.数値モデル化が困難な関節部分に関しては実関節を試験することで挙動を把握し,その他のリンク部などの慣性項等については,CAD (Computer Aided Design) モデルから得られる数値モデルを使用する.
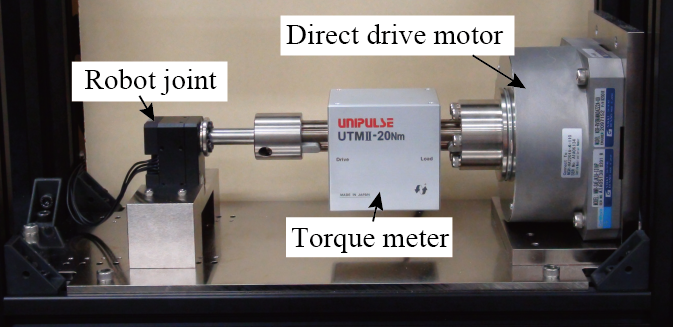
図1にロボット関節用HILSの構成図を示す.図2に示すようにロボット関節をトルクメータを介してダイレクトドライブ (DD) モータと接続し,実際に多関節ロボットを動作させた時に発生するであろう負荷をロボット関節にDDモータによって与える.DDモータによって負荷を印可された状況でのロボット関節の発生トルクをトルクメータによって計測し,リンク部分の数値モデルに基づいた順動力学計算によって関節の角加速度を求め,次のステップでDDモータでロボット関節に負荷を与える.これにより,シミュレーション中に時々刻々実ロボット関節から挙動を取得しシミュレーションを行うことができる.

2自由度平面マニピュレータのシミュレーション
2自由度の平面マニピュレータを例に,2台のテストベンチを用意し,HILS試験を行った様子を図3に示す.実ロボット関節の位置制御ゲインをあえて低く設定し,目標関節軌道と差異が生じるようにした.この状況をHILSでシミュレーションすることで再現することに成功した.
参考文献
- Yusuke Noda, Tetsuya Kimura, Satoko Abiko, Teppei Tsujita, Daisuke Sato and Dragomir N. Nenchev, Development of a Hardware-in-the-Loop Simulator for Analyzing Motion of Multi-DoF RobotsWithout Modeling Complex Joint Parts,Proceedings of the SICE International Symposium on Control Systems 2019, 1H1-5, Kumamoto, Japan, 7 March, 2019.
- 木村哲也,野田悠介,辻田哲平,安孫子聡子,佐藤大祐,金宮好和, 柔軟関節を有する平面マニピュレータのHardware-In-the-Loop-Simulation 第6回計測自動制御学会制御部門マルチシンポジウム講演論文集,PS1-9,熊本,3月7日,2019.
- 野田悠介,木村哲也,辻田哲平,安孫子聡子,佐藤大祐,金宮好和,多関節ロボットの挙動を単一関節試験器で解析可能なHardware-in-the-Loop Simulatorの開発, 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集,pp. 2251-2256,大阪,12月15日,2018.
- 木村哲也,野田悠介,辻田哲平,佐藤大祐,安孫子聡子,金宮好和,柔軟関節を有するロボット設計のためのHardware-In-the-Loop-Simulatorの開発 ロボティクス・メカトロニクス講演会'18 講演論文集,資料番号2P1-F14,北九州,6月5日,2018.