研究内容
手術シミュレータ
手術シミュレータ用遭遇型ハプティックインタフェースの開発

医療現場において,手術計画の検討や技術向上のために,バーチャルリアリティ技術を応用した手術シミュレータの導入が期待されています.手術シミュレータでは,計算機内で構築された仮想人体に対して手術を行った際の反力を,ハプティックインタフェース(力覚提示装置)を用いて術者に提示することで,より現実感の高い手術感覚を体験することができます.このため,様々な力覚提示装置を有した手術シミュレータが開発されています. 手術器械の形状は多種多様で,器械を介した力覚を提示するためには,器械をハプティックインタフェースに固定する方法が最も簡便です.しかし,機械的に固定してしまうと,手術手技において重要な術中の術具交換が困難になってしまいます.そこで,本研究では機能性流体の一つであるMR(Magnetorheological) 流体を仮想臓器に見立て,直接術具でMR 流体に対して切断等の操作を行い,術具の交換が容易なハプティックインタフェースを開発しています.
脳外科手術シミュレーションソフトウエアの開発
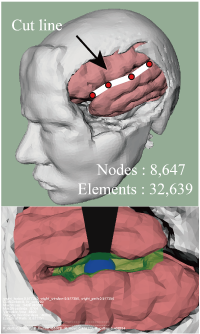
近年,高度な手術手技の開発により,多くの命が救われ,術後の生活の質的向上ももたらされています.一方で,常に最新の治療方法を身につけなくてはならない医師にとっては大きな負担となっており,効率的に新しい手術手技を学習できる環境が必要となっています. これまで広く用いられてきたゴム製の手術トレーナや動物を用いた訓練などでは,訓練できる回数に制限があります.また,特殊な症例などの練習もなかなかすることができません.そこでバーチャルリアリティ技術を応用した手術シミュレータの開発が盛んに行われています.本研究では,計算機の中に仮想的な人体モデルを作成し,仮想空間内で外科手術を行うことができるシミュレーションソフトウエアを開発しています.
ヒューマノイドロボット
運動知能に関する研究

人型ロボットであるヒューマノイドロボットは,人が生活している環境下で人の代わりに様々な作業を担うことが期待されています.ヒューマノイドロボットは,その脚により移動し,腕によって人間のように作業を行うことができます.従って,産業用ロボットアームと異なり,自ら移動し作業現場に移動することができます.また,数多くの関節を有し,複雑な作業も可能です.しかし,ヒューマノイドロボットは地面に固定されていないため,外部から受ける力によって転倒してしまう危険性もあります.本研究では,転倒や破損の危険性を回避しながら,全身協調動作によって巧みに衝撃力を発生させる,もしくは緩和する方法について研究しています.
多関節ロボット開発用HILS (Hardware-In-the-Loop-Simulator) の提案
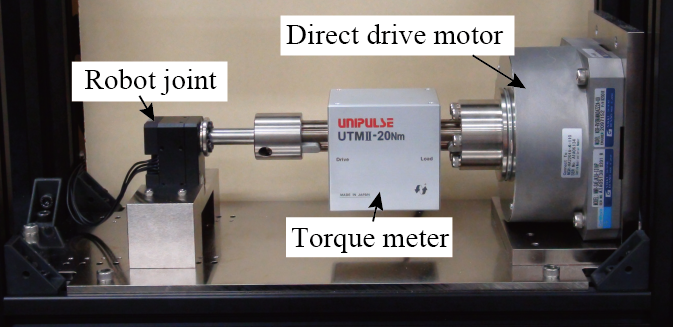
現在のロボット開発フローにおいて,数値シミュレーションのみで実際のロボットの挙動を正確に予測することは難しく,実機を試作して試験し改良するといった工程を繰り返す必要があり,開発の長期化・高コスト化の要因となっています..本研究では,数値シミュレーションにおいてモデリングが困難な要素の一つである,ロボット関節に焦点を当て,関節部のモデル化を必要としないシミュレーション方法を提案しています.これにより,モデリングが困難な柔軟関節などの次世代ロボットの関節機構の設計を加速することが可能となります.
ロボットの平和的利用に関する研究
ロボット技術による武力紛争の人道化
人工知能(AI)やロボット技術の発展に伴い,今日,世界中でロボットの兵器化が注目を集めています.こうした状況に不安を抱く声も多く,既存の国際ルールでどこまでロボット技術を平和的または人道的に利用することが可能なのか,また,そのためにはどのような規制が新たに必要となりうるのかを実証的に検証する研究が急務とされています.こうした状況に鑑み,本研究は,ロボット技術が武力紛争の犠牲者保護にどこまで資する可能性を秘めているのかに焦点を当て,また将来的にはこれを人間に任せることのリスク(ヒューマン・エラーをめぐる問題)の分析をも視野に入れつつ,以上の問題を学際的アプローチで検討することを目的とするものです.